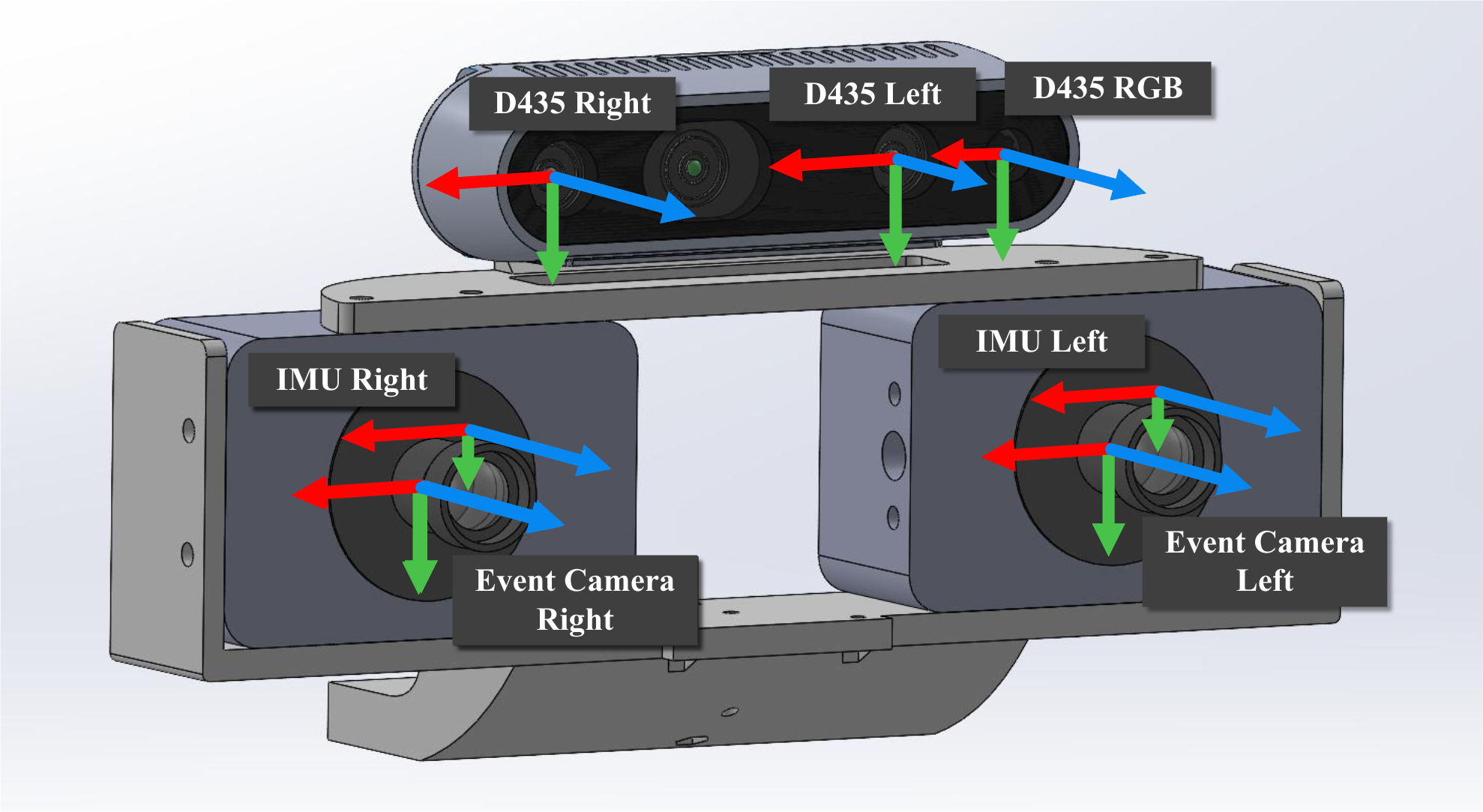
The axes of all sensors are labeled and color-coded as follows: Red for X, Green for Y, and Blue for Z.
Intrinsic and Extrinsic Calibration of Cameras
We use the Kalibr toolbox to estimate the intrinsic and extrinsic parameters for the two camera pairs separately. Since the Kalibr toolbox requires image-format data for camera calibration, we utilize the Simple Image Reconstruction library to recover frames from raw event data. For accurate extrinsic parameters estimation, we first synchronize the event and RGB cameras using the synchronization scheme, and then perform image reconstruction at the midpoint of each image’s exposure time.
- Intrinsic and Extrinsic Parameters: results
Extrinsic Calibration of Camera and IMU
For the extrinsic calibration between the cameras and the IMU, we effectively stimulate the sensor suite along the six degrees of freedom of the IMU in front of an AprilTag grid pattern and record the corresponding sequences. The Kalibr toolbox is then used to perform the extrinsic calibration.