EvSLAM Benchmark
An Event-based SLAM Benchmark for High-Speed Maneuvers
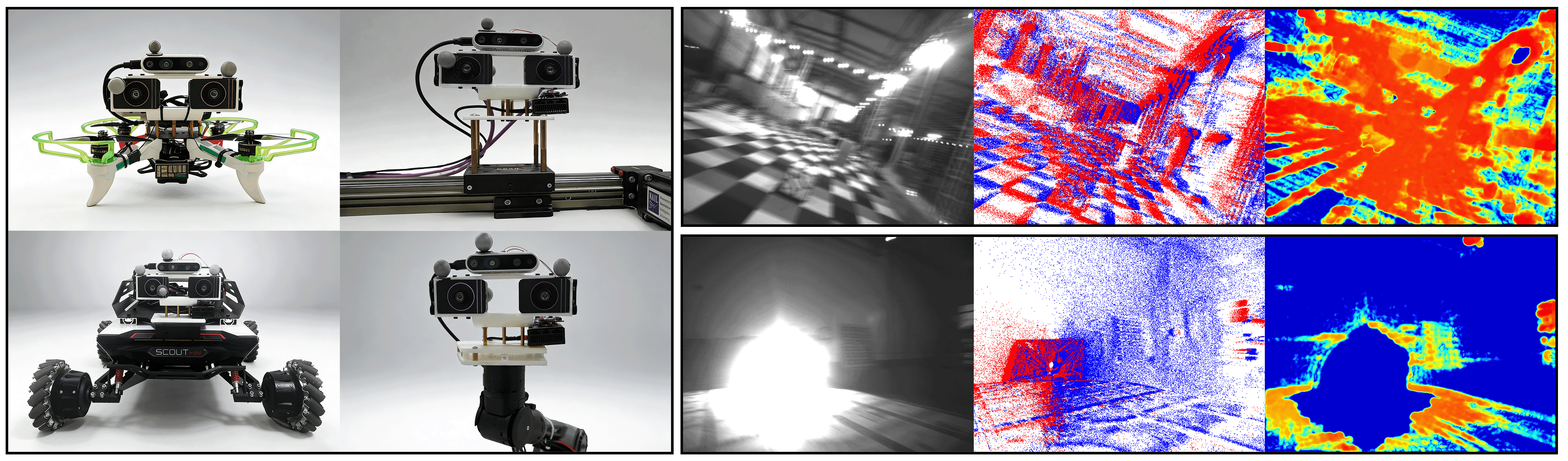
We present an event-based SLAM benchmark for high-speed maneuvering robotic scenarios:
- Multiple sequences captured by a stereo event camera equipped with an IMU on various mobile robotic platforms, covering diverse challenging motion patterns and extreme lighting conditions.
- An effective lens-focusing strategy to solve the spatio-temporal stereo inconsistency of event data existing in some public datasets.
- Synchronous stereo grayscale and monocular color images with consistent resolution, supporting event-image fusion research and comparison with frame-based methods.
- A comprehensive review and critical analysis of state-of-the-art event-based VO/SLAM methods, along with systematic benchmarking on the proposed dataset.
News
| Mar. 5, 2026 | EvSLAM Benchmark goes live! |
|---|



